
Proposed Spray System for Family Agriculture with A Remote-Controlled UAV (Small Drone or Helicopter) and An Economical Sprinkler
Abstract
In the country, food production is more compromised every day, despite zero efforts and government, agricultural and livestock sector, causing poverty, migration, marginalization among other social disorders in addition to food insecurity. In Mexico 34% of the population is engaged in agricultural tasks, with very small land areas. The fact that 85% of do not have more than 5 ha of arable land, and that among them, 90% do not reach 3 ha clearly indicates their great need for light machinery .The solution to these problems family farmers are provided with affordable technologies to increase their productivity. One of the most common problems in agriculture is the application of agrochemicals, which is tedious and dangerous when farmers are exposed to these highly toxic products, therefore a system is proposed is through the help of a drone or remote control helicopter, both of economic type connected by a hose to the sprinkler and a tank. Due to the danger of applying agrochemicals for family farmers who rarely follow the precautions to apply these products, the proposed alternative is attractive for small agricultural properties, although it is not free of cost, the drone and the optimal sprayer should be investigated.
Article Information
- Received
- Accepted
- Published
Academic Editor: Abubaker Haroun Mohamed Adam, Department of Crop Science (Agronomy), College of Agriculture, Bahri University- Alkadaru- Khartoum -Sudan.
Checked for plagiarism: Yes
Review by: Single-blind
Copyright © 2020 Jaime Cuauhtémoc Negrete
 This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Corresponding author: Jaime Cuauhtémoc Negrete Independent researcher and technical writer, Universidad Autónoma Agraria Antonio Narro, Buenavista, Mexico —
Competing Interests
The authors have declared that no competing interests exist.
Funding
No specific funding statement was provided by the authors.
Data Availability
No data-availability statement was provided by the authors.
Citation:
Introduction
In the country, food production is more compromised every day, despite zero efforts and government demagoguery, the agricultural and livestock sector is in full productive decline, causing poverty, migration, marginalization among other social disorders in addition to food insecurity.
In Mexico 34% of the population is engaged in agricultural tasks, with very small land areas. The fact that 85% of the peasants do not have more than 5 ha of arable land, and that among them, 90% do not reach 3 ha clearly indicates their great need for light machinery 1.
2, affirms that the capital factor is very distant from the needs of the family and is manifested in the shortage of agricultural equipment and infrastructure. Some authors proposes the application of new technologies in Mexican Agriculture such as Agricultural Mechatronics 3; Precision Agriculture & Dron´s 4; Arduino 5.In this situation, family farming is the only one that faces the challenge of feeding the marginalized population in extreme poverty. The solution to these problems can be mitigated if family farmers are provided with affordable and affordable technologies to increase their productivity. One of the most common problems in agriculture is the application of agrochemicals, which is tedious and dangerous when farmers are exposed to these highly toxic products, therefore a system is proposed by which the application is through the help of a drone or remote control helicopter, both of economic type connected by a hose to the sprinkler and a tank.
Summarizing, the only way to reverse the situation of extreme poverty in rural areas in Mexico is through modern technologies ,in the world there is a revolution in the application of tew Technology in agricultural production, livestock, aquaculture, apiculture, greenhouses, among others, this being the purpose of this paper to Proposed a Sprayer System for family farming with a remote-controlled UAV (small drone or helicopter) and an economical sprayer.
Table 1. Uav´s spraying in the world| Author and year | Description | country |
| 6 | Design the drone that is unmanned aerial vehicle (UAV) for agricultural purpose for spraying pesticides | India |
| 7 | Proposes a new mission assignment scheme aimed at the farmland spraying problem. A simulation platform is established and a series of simulations are carried out to verify the reasonability and correctness of this scheme | |
| 8 | Developed a low volume spray system for use on a fully autonomous UAV to apply crop protection products on specified crop areas. This article discusses the development of the spray system and its integration with the flight control system of a fully autonomous, unmanned vertical take‐off and landing helicopter | USA |
| 9 | Describe an architecture to address the problem of self-adjustment of the UAV routes when spraying chemicals in a crop field. We propose and evaluate an algorithm to adjust the UAV route to changes in wind intensity and direction | Brazil |
| 10 | Proposes a computer-based system that is able to autonomously adapt the UAV control rules, while keeping precise pesticide deposition on the target fields. Different versions of the proposal ,with autonomously route adaptation metaheuristics based on Genetic Algorithms, Particle SwarmOptimization, Simulated Annealing and Hill-Climbing for optimizing the intensity of route changes are evaluated in this study. | Brazil |
| 11 | Development an Unmanned Aerial Vehicle for use in aerial spraying to reduce the risks of manned agricultural operation. Thus, It is presented the methodology used to determine the thrust to weight ratio and wing loading, and geometric characteristics of the UAV. | Brazil |
| 12 | Presents a new Pulse Width Modulation (PWM) controller for Unmanned Aerial Vehicle (UAV) precision sprayer for agriculture using a TL494 fixed-frequency pulse width modulator together with a data acquisition board and developed software. | China |
| 13 | Introduce each UAV’s kinematic constraint and extend the Euclidean distance between fields to the Dubins path distance. We then analyze the two factors affecting the pesticide spraying effects, which are the type of pesticides and the temperature during the pesticide spraying. | China |
| 14 | Tested , a hexa copter unmanned aerial agro-chemical spraying (UAAS) system at different heights and nozzle openings to determine spray uniformity in the field conditions. | Pakistan |
| 15 | Very little research has been conducted to optimize application parameters and measure the potential of off-target movement from UAV-based pesticide applications. | |
| 16 | Conducted a study to measure spray drift from a 0.84 ha aerial pesticide application of imidacloprid performed with a Yamaha R-Max II UAV over a Napa Valley vineyard. | USA |
| 17 | Presented Laboratory results of spraying maize plants using a multi-rotor drone | Poland |
| 18 | Present the results of research are related to the influence of the air stream produced by the drone on the distribution of the jet deposited under the drone that is sprayed with the aid of the XR 11002 slot sprayer, with water pressure of 0.4 MPa and Steinernema feltiae entomopathogenic nematodes contained in it. An influence was found of air on a change in distribution of the liquid that is deposited on the groove patternator and the concentration of the nematodes in the depositing liquid. | Poland |
| 19 | Presented results of research into the impact of rotors rotary speed of moving drone on the spraydeposition on plant surfaces. The liquid was sprayed from the drone with the use of the XR 11002 flat fan nozzle at the pressure 0.2 MPa | Poland |
| 20 | Researches the influence of liquid pressure in a DGTJ60–11002 twin flat nozzleinstalled on a drone and the influence of air produced by moving drone rotators on changes in liquidvolume transverse distribution of deposing drops stream on the patternator. | Poland |
| 21 | Development of UAV-based application technology takes priority. Spraying low-volume pesticide using UAVs at low flight altitude differs from either conventional manned aerial application or ground equipment based application, and thus a wide variety of spray parameters warrants further investigation | China |
| 22 | Designed and manufactured a prototype multi rotor UAV for aerial pesticide applications . Computer aided design and analyses were used for the development of the UAV. The developed hexacopter UAV has an aluminum frame and carries a 5 liters pesticide tank and powered by a 222 W battery. | Turquia |
| 23 | Reports the current status of drone pesticide application in China and makes comparisons with its neighbor countries Japan and South Korea in terms of different UAV platforms and their implementation in plant protection for different crops. Challenges and opportunities for future development of UAV-based pesticide application technology are also discussed. | China |
| 24 | Evaluated the effectiveness of a roll balanced helicopter during hovering and cruising spray maneuvers by analyzing flight attitudes and spray patterns. The hovering spray was performed at a height of 3.5 m, and the pattern was determined by a string deposition analysis system. | Korea |
| 25 | Explored the impact of multi-rotor UAV (four-rotor electronic UAV, 3WWDZ-10A) application on controlling the stem borer in sugarcane variety GT46 with aerial spray of 1.5% abamectin (liquid) and 2% lufenuron (microemulsion) at seedling stage of sugarcane crop. | China |
| 26 | Compare the droplet deposition, control efficacy and working efficiency of a six-rotor UAV with a self-propelled boom sprayer and two conventional knapsack sprayers on the wheat crop. | China |
| 27 | Designed a plant protection UAV variable spray system integrating neural network based decision making , Based on existing variable spray research | China |
| 28 | Compared the spraying effect of EAP sprayer and UAV sprayer, the droplet distribution and control efficacy were studied. This study focused on the feasibility of UAV spraying pesticide in processing pepper field, and further explored the UAV spraying technology to pest control in processing pepper field | China |
| 29 | Presents a novel and practical design and development of a small application system capable of being mounted on an unmanned aerial vehicle for agrochemical spraying tasks and an analysis of the quality of the application and economic costs in olive and citrus orchards compared with those of a conventional treatment | Spain |
| 30 | Designed a field study to quantify factors influencing the uniformity of spray deposition from a multi-rotor UAV that is operated commercially in New Zealand. Two sampling systems for measuring spray deposition, a continuous horizontal string and steel plates placed on the ground were compared. | New Zealand |
| 31 | The effect of three UAV spray volumes (9.0, 16.8 and 28.1 L ha-1 ) using three different nozzle sizes on droplet deposition and wheat aphid and powdery mildew control efficacy was assessed. An electric air-pressure knapsack (EAP) sprayer was used as a comparison. | China |
Materials and Methods
A thorough search was made on the use of the internet in agriculture, using the databases of universities, research centers, scientific journals, the use of the same internet of things being relevant, and after analyzing the references, the system was conceptualized.
Discussion
Fumigation Drones
There are drones that are used in the application of agrochemicals but they are excessively expensive, their price is around 13,000-15,000 dollars with drones for agricultural spraying. They are currently in the development phase, having prototypes and test equipment in which they have been observed. the following characteristics: They are fundamentally mounted on multi-rotor equipment, They have a total weight of up to 25 Kg, They have tanks of 5 to 15 liters, They use height control and GPS positioning. There is the possibility of carrying out treatments in automatic flight mode or manual flight mode 32.There is another brand 33 is a dron for pesticide and liquid fertiliser application with a capacity of up to 100 litres it is 50 times faster than manual application at up to 50 ha / hour (123 acres / hour). The drone has a default spray system length of 10 meters (32 feet).
Spraying Helicopters
The unmanned Yamaha RMAX duster helicopter weighing approximately 70 kg, loading up to 30 kg of seed in a hopper or 32 liters of fertilizer or pesticide. The manufacturer says the drone is capable of doing this autonomously and covers up to 4 hectares per flight. It costs approximately $ 130,000. 34. The RMAX system has been in service internationally since 1997 and has logged more than 2 million flight hours treating agricultural acres. Today there are 2,500 Yamaha RMAX helicopters flying worldwide, spraying more than 2.4 million agricultural acres annually. Applications via RMAX are more faster and more efficient than current ground spray applications from four-wheelers, tractors or workers on foot. 35. Figure 1
Figure 1. Proposed Spray System with a remote-controlled UAV(small drone or helicopter) and an economical sprinkler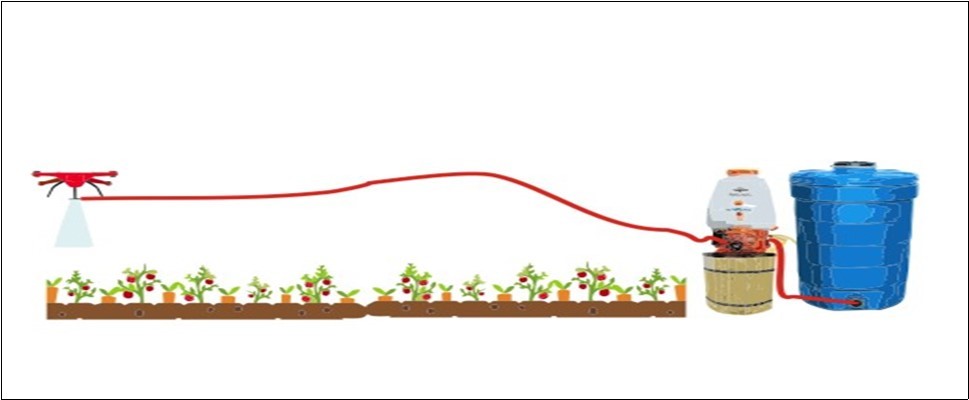
Download figure
Results
The proposal is a remote-controlled drone o helicopter that has an average price of $ 800-2500 plus a sprayer of $ 400-500 would average an average of around $1,200- 3,000 against the $ 13,500-15,000 of a fumigator drone. The main limitation for aerial applications of agrochemicals is the ability of the drone to load the liquid to be applied, by eliminating this restriction by connecting the drone to a tank, this makes it possible to carry out this application with a smaller and less powerful drone, consequently more economical. and this allows its acquisition by a greater number of family farmers.
Conclusion
Due to the danger of applying agrochemicals for family farmers who rarely follow the precautions to apply these products, the proposed alternative is attractive for small agricultural properties, although it is not free of cost, the drone and the optimal sprayer should be investigated. More research should be done to determine the proper spray and drone combination for each farm size.
Mention of trademark, vendor, or proprietary product does not constitute a guarantee or warranty of the product by the author and does not imply its approval to the exclusion of other products that may also be suitable
References
- 1.Negrete J C, Machado ALT, Machado RLT. (2012) Diseño de tractores agrícolas en México. Rev Cie Téc Agr. 21(1), 5-11.
- 2.M A Fernandez, R.Arias y J.Nissen (2002) . La Mecanización de la Pequeña Agricultura, un estudio de caso, Cunco IX, región Chile. , Agrosur 30(2), 43-54.
- 3.Negrete J C. (2015) Mechatronics in Mexican Agriculture Current Status and Perspectives. , SSRG International Journal of Agriculture & Environmental Science (SSRGIJAES)– 2(3).
- 4.J C Negrete. (2017) Precision agriculture in Mexico; Current status and perspectives. , International Journal of Horticulture 7(11), 33-39.
- 5.J C Negrete, E K Romantchik, Lopez G D J C, Zuñiga C I A, G H Lopez. (2018) Arduino board in the automation of agriculture in Mexico, a review. , International Journal of Horticulture 8(6), 52-68.
- 6.Desale R, Ashwin C, Mahesh C, Vikrant B, Teli S N. (2019) Unmanned Aerial Vehicle For Pesticides Spraying. , IJSART 5(4).
- 7.Anand K, Goutam R. (2019) An Autonomous UAV for Pesticide Spraying. International Journal of Trend in Scientific Research and Development (ijtsrd) Volume-3 | Issue-3 986-990.
- 8.Huang Y, Hoffmann W, Lan Y, Wu W, Fritz B. (2009) Development of a spray system for an unmanned aerial vehicle platform. , Applied Engineering in Agriculture 25(6), 803-809.
- 9.Faiçal B S. (2014) The use of unmanned aerial vehicles and wireless sensor networks for spraying pesticides. , Journal of Systems Architecture 60(4), 393-404.
- 10.B S Faiçal, Freitas H, P E Gomes, U.eyama (2017) .An adaptive approach for UAV-based pesticide spraying in dynamic environments.Computers and Electronics in. , Agriculture 138, 210-223.
- 11.Matsuo C A C. (2011) Projeto de um veículo aéreo não tripulado para pulverização aeroagrícola. DISSERTAÇÃO Mestrado .UNICAMP,Campinas,Brazil. DISSERTAÇÃO Mestrado .
- 12.Zhu H. (2010) Development of a PWM precision spraying controller for unmanned aerial vehicles. , Journal of Bionic Engineering 7(3), 276-283.
- 13.Luo He, Niu Yanqiu, Moning Z, Xiaoxuan H, Huawei M. (2017) Optimization of Pesticide Spraying Task vis Multi.UAVS using Genetic Algorithm. Mathematival Problems in Engineering.
- 14.Ahmad Ashfaq, M Ahsan Latif, Ashraf Shaharyar, Ahmad Shoaib. (2019) Spray Uniformity Testing of Unmaned Aerial Spraying Systems for Precise Agro-Chemical Applications. , Pak. J. Agri. Sci 56(4), 897-903.
- 15.Hunter J, Gannon T, Richardson R, Yelverton F, Leon R. (2019) Coverage and drift potential associated with nozzle and speed selection for herbicide applications using an unmanned aerial sprayer. Weed Technology. 1-6.
- 16.C R Brown, D K Giles. (2018) Measurement of Pesticide Drift from Unmanned Aerial Vehicle Application to a VineyardTransactions of the ASABE. 61(5), 1539-1546.
- 17.Berner B, Pachuta A, Chojnacki J. Engineering. Koszalin University of Technology (2018) Estimation of liquid deposition on corn plants sprayed from a drone. 4TH Workshop on Applied and Sustainable .
- 18.Berner B, Chojnacki J. (2017) Influence of the air stream produced by the drone on the sedimentation of the sprayed liquid that contains entomopathogenic nematodes. , Journal of Research and Applications in Agricultural Engineering 3(62), 26-29.
- 19.Berner B, Chojnacki J. (2017) Use of drones in crop protection. In Proceedings of IX InternationalScientific Symposium Farm Machinery and Processes Management in Sustainable Agriculture. Lublin2017: 46-51.
- 20.Pachuta A, Berner B, Chojnacki J. (2018) Koszalin University of Technology. Evaluation of liquid transverse distribution under a twin spray jet installed on a drone. 4TH Workhop on Applied and Sustainable Engineering.
- 21.He Xiongkui. (2018) Rapid Development of Unmanned Aerial Vehicles (UAV) for Plant Protection and Application Technology in China. Outlooks on Pest Management. 29(4), 162-167.
- 22.KOÇ Caner. (2017) Design and Development of a Low-cost UAV for Pesticide Applications. , JAFAG Journal of Agricultural Faculty of Gaziosmanpasa University 34(1), 94-103.
- 23.X K He, Bonds J, Herbst A, Langenakens J. (2017) Recent development of unmanned aerial vehicle for plant protection in East Asia. , Int J Agric & Biol Eng,; 10(3), 18-30.
- 24.Bai Y, Y M Koo. (2013) Flight attitudes and spray patterns of a roll-balanced agricultural unmanned helicopter. , Applied Engineering in Agriculture,; 29(5), 675-682.
- 25.Zhang Xiaoqiu.Yong-Jian Liang, Xiu-Peng Song (2019). Application of Multi-rotor Unmanned Aerial Vehicle Application. in Management of Stem Borer (Lepidoptera) in Sugarcane. BiologyPublished in Sugar TechDOI;10.1007/s12355-018-0695-y
- 26.Wang Guobin, Lan Yubin, Yuan Huizhu, Qi Haixia, Chen Pengchao et al. (2019) Comparison of Spray Deposition, Control Efficacy on Wheat Aphids and Working Efficiency in the Wheat Field of the Unmanned Aerial Vehicle with Boom Sprayer and Two Conventional Knapsack Sprayers. , Appl. Sci.,doi;10.3390/app9020218 9(218).
- 27.Wen S, Zhang Q, Yin X, Lan Y, Zhang J et al. (2019) . Design of Plant Protection UAV Variable Spray System Based on Neural Networks. Sensors (Basel). Published2019Mar5.doi;10.3390/s19051112 19(5), 1112.
- 28.Xiao Qinggang, Du Rui, Yang Lin, Xiaoqiang H, Sifeng Z et al. (2020) . Comparison of Droplet Deposition Control Efficacy on Phytophthora capsica and Aphids in the Processing Pepper Field of the Unmanned Aerial Vehicle and Knapsack Sprayer. Agronomy,doi: 10.3390/agronomy10020215 10-215.
- 29.Martinez-Guanter J, Agüera P, Agüera J. (2020) Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. , Precision Agric.https://doi.org/10.1007/s11119-019-09665-7 21, 226-243.
- 30.Richardson B, Rolando C A, Somchit C, Dunker C, T M Strand et al. (2019) Swath pattern analysis from a multi-rotor unmanned aerial vehicle configured for pesticide application. Pest Manag Sci.2020Apr.doi;10.1002/ps.5638. 76(4), 1282-1290.
- 31.Wang G, Lan Y, Qi H, Chen P, Hewitt A et al. (2019) Field evaluation of an unmanned aerial vehicle (UAV) sprayer: effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag Sci.2019Jun;doi;10.1002/ps.5321. 75(6), 1546-1555.
- 32.Drones para fumigación agrícola son viables. in Spanish on line in (https://www.agroptima.com/es/blog/drones-para-fumigacion-agricola-.-Mson-viables/)
Cited by (2)
This article has been cited by 2 scholarly works according to:
Citing Articles:
Frontiers in Microbiology (2025) OpenAlex Crossref Semantic Scholar
Sustainability (2023) OpenAlex Crossref Semantic Scholar