
RESinvANFIS v1.0 - A Versatile MATLAB Tool for Inverting Geoelectrical Resistivity Sounding Data using Neuro Fuzzy Technique
- Open Access
- Peer Reviewed
- Similarity Checked
- CC BY 4.0
Abstract
Geoelectrical resistivity data is used for estimating the subsurface features of earth. It is very difficult to estimate the depth and true resistivity analytically, therefore many mathematical models approximates the result. The approximation relies on many parameters as the heterogenous model of earth is difficult to map. Conventional interpretation algorithm mostly uses the forward modelling technique which is limited for different lithologies. Here we presented ResinvANFIS v1.0 software platform to invert any type (A, Q, K, H or any mixed data types) of resistivity data having AB/2 and apparent resistivity data as input. This kind of generalised platform has not been done elsewhere to invert data directly using soft computing approach.
Article Information
- Received
- Accepted
- Published
Academic Editor: Loai Aljerf, Department of Life Sciences, Faculty of Dentistry, University of Damascus, Syria.
Checked for plagiarism: Yes
Review by: Single-blind
Copyright © 2020 A. Stanley Raj, et al.
 This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Corresponding author: Correspondence: A. Stanley Raj, Department of Physics, Loyola College, Nungambakkam, Chennai 600034, India. Tel: +91 99401 20058. Fax: +91 44 26840262 —
Competing Interests
The authors have no conflicts of interest to declare.
Funding
No specific funding statement was provided by the authors.
Data Availability
No data-availability statement was provided by the authors.
Acknowledgements
We thank Manonmaniam Sundaranar University for carrying out the research by providing enough software package and environment necessary for developing the software. Also, the author is willing to thank the management of Loyola College to publish this article. Moreover the improvement comes from the criticism of notable professors Dr. KK Sharma, Dr. N. Sundararajan and friends Dr. Joe Vivek and Dr. Saravanan. Thanks for them too.
Citation:
Introduction
Motivation and Significance
Many conventional methods were adopted to invert geoelectrical resistivity data. A tool with soft computing approach is new in the field of inverting resistivity data. Previous researchers’ works on soft computing research acclaims the ‘conventional/traditional’ approach on inversion. For example, the system and architecture of soft computing were designed on the basis of previously learned examples. Training is a major part that is the primary requirement for any artificial intelligent technique. Researchers studied the artificial intelligent techniques to predict lost circulation 1, 11. Additionally, with lack of training datasets will result in inaccuracy of bringing out good optimisation. Training datasets will precise the result invariably. This needs extra time to spend for training. Field datasets with much complex geological settings will definitely make the problem more ill-posed. Ten datasets of two square kilometre radius would not be a good optional for training and testing for eleventh dataset. The reliability and performance lies in the training datasets and the way of training. This research work prevails in modifying the training database in such a way that generating the synthetic datasets of its own.
Few researchers applied neuro fuzzy algorithm to interpret geoelectrical resistivity data 12, 13, 14. This software provides the platform of neurofuzzy inversion technique for inverting geoelectrical data. It is a novel method in the sense that applying the generalised approach for any kind of field datasets. This software will work for any field data collected around the world with any kind of geological settings. It is not so in the conventional artificial intelligent techniques where it needs more training datasets to enhance the performance. This proved to be the versatile algorithm. Over fitting problem has been avoided by automatic adjustment of training parameters with respect to the output error percent. To restrict the output to minimum error percent the system will adjust the parameters in the mean time while training. This proposed technique proved to be helpful for researchers relying on 1D vertical electrical sounding (Wenner/ Schlumberger methods) data. The intention of this development of software is to promote the soft computing inversion techniques which are more applicable and reliable in the field of earth sciences. The non-availability of any soft computing based software for inverting geoelectrical data in the market as ‘generalisation’ is difficult to build upon. This has been overcome in this algorithm. The overall impact of this software is it will generate a new platform in soft computing experts to move on generalisation to unveil the heterogeneity of earth’s subsurface. Disparities between conventional and soft computing inversion, is now descending to the level of competing, each other in terms of attaining uniqueness. The experimental evidences have been presented for validating the algorithm.
Methodology
Vertical Electrical Sounding (VES)
The electrical resistivity survey involved vertical electrical sounding (VES) is based on measuring the potentials between one pair of electrodes while transmitting a direct current between another pair of electrodes. Depth of current penetration is proportional to the spacing between the electrodes in homogenous ground, and varying the electrode separation provides information about the stratification of the ground. Vertical electrical soundings are applied to a horizontally or approximately horizontally layered earth. Geological targets may be, e.g., sedimentary rocks of different lithologies, layered aquifers of different properties, sedimentary rocks overlaid igneous rocks, or the weathering zones of igneous rock in the most favourable case, the number of layers, their thickness and resistivity are outcome of a VES survey.
The Vertical Electrical Sounding (VES) is a very appropriate method to explore layered underground. By performing a VES, a linear electrode array is laid out in the field injecting a direct or a slow alternating current into the underground. In the center, the voltage response is measured simultaneously between two electrodes. Increasing depths are realized by enlargement of the current electrode from small distances in the beginning to larger at end.
Electrode Configuration
Wenner Configuration
It is most commonly used electrode system. In the Wenner spread the electrodes are uniformly spaced in a line. It is the simplest and most asymmetrical arrangement. It, or modification of it, has been used widely in UK, USA, Canada and few other countries. For depth exploration using the Wenner spread, the exploration are mapping, the spacing remains constant and all four electrodes are moved electrodes are expanded about a fixed centre, increasing the spacing in steps. In mapping the apparent resistivity for each array position is plotted against the centre of the spread. The Wenner array on particular demands less instrument sensitivity, and reduction of data is marginally easier. The equation for calculating geometric factor Kequals to 2πa
Schlumberger Configuration
This differs from the Wenner configuration in placing the two current electrodes with a much larger interval than that between the two inner potential electrodes. In Schlumberger configuration the current electrodes are denoted by A and B while the potential electrodes are denoted by M and N. The interval between M and N may be denoted by b while interval AB/2 is denoted by s. The current electrodes AB may be placed as inner electrodes, and the two potential electrodes M and N as outer electrodes. This arrangement has the advantage that in depth sounding, long current carrying cables may be avoided.
For this array, the geometric factor (K) is:
K= π ( AB 2 - MN 2) /2MN
In a survey with varying electrode spacing, field operations with the Schlumberger array are faster, because all four electrodes of the Wenner array are moved between successive observations, but with the Schlumberger array, only the outer ones need to be moved. The Schlumberger array is also said to be superior in distinguishing lateral from vertical variations in resistivity. So the survey was carried out in our study area with Schlumberger Configuration.
Due to different geological settings the software uses multilayer model to evaluate the thickness and true resistivity. As the variations in resistivity with respect to the geology is much larger to estimate it. Thus the soft computing algorithm is designed to estimate the thickness and true resistivity with maximum number of iterations to optimize the result.
Instrumentation
Electrical resistivity methods are successful in delineating lateral and vertical variation of subsurface geology. Detailed survey has been carried out with DC Resistivity meter IGIS DDR3. This is very compact and highly reliable equipment, which is used for resistivity measurement. This DDR3 resistivity meter poses two main units such as Current unit and potential unit. This unit measures the potential difference across the potential electrodes as also the resistance values provide direct display over digital panel metre. The purpose of current unit is to send the current in a constant manner to the subsurface and the potential unit provides the accurate measurement of potential variations and displays it.
The current and potential electrodes which are made up of conducting metals such as iron, copper, steel etc., are connected to the DDR3 resistivity meter through well insulated cables wounded on the winch.
Software Functionalities
Software Description
Figure 1 shows the flowchart for 1D VES inversion software-backend algorithm. Once the suitable third-party software programs are downloaded and installed, the process involves three steps. Step (1) the user have to define the parameters (viz., no. of epochs, permissible error). Step (2) the user have to give the data using the ‘import data’ push button (where the user can upload AB/2 and apparent resistivity values). If the user requires modifying the data, it can be accessed through ‘edit data’ push button. Step (3) which applies the inversion algorithm to model the data which is of generalised version that it will be applicable for any kind of data.
Figure 1. Flow chart showing the RESinvANFIS workflow algorithm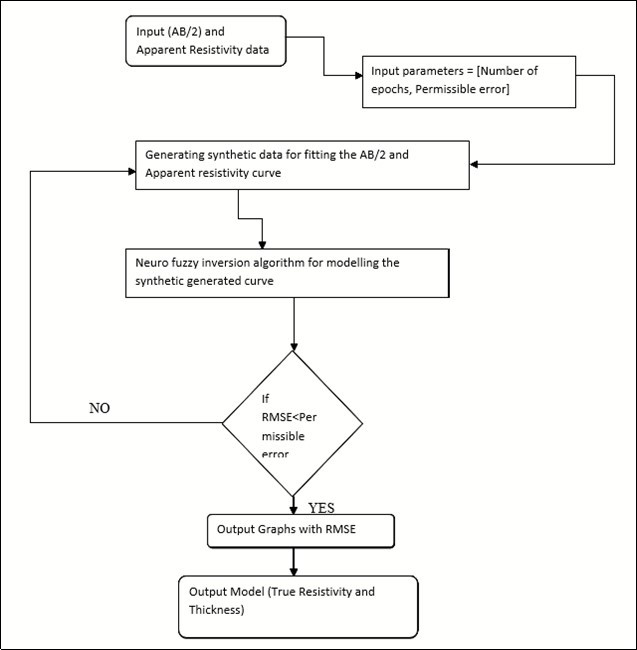
Download figure
Software Functionalities, Work Flow and Example Model
RESinvANFIS was created under the Graphical User Interface (GUI) of MATLAB environment. The package has been developed using the deploy tool of MATLAB and work as a stand alone application in windows. It is written primarily in MATLAB platform and the entire program is executed through series of automated instructions that will proceeds the inversion algorithm without any interruption. The MATLAB platform was chosen for applying the soft computing inversion algorithm efficiently. Table 1
Figure (A) Symmetrical electrode arrangement of Wenner array, (B) Schlumberger array 17.
Download figure
| S.NO | MATERIALS | RESISTIVITY(Ω-M) |
|---|---|---|
| 1. | Igneous and Metamorphic Rocks | |
| Granite | 5×103-106 | |
| Basalt | 103-106 | |
| Marble | 102-2.5×108 | |
| Quartzite | 102-2.5×108 | |
| Slate | 6×102-4×107 | |
| 2. | Sedimentary Rocks | |
| Sandstone | 8-4×103 | |
| Shale | 20-2×103 | |
| Limestone | 50-4×102 | |
| 3. | Soils and waters | |
| Clay | 1-100 | |
| Alluvium | 10-800 | |
| Groundwater (Fresh) | 10-100 | |
| Sea water | 0.2 | |
RESinvANFIS is a standalone application that provides the output subsurface layer model (e.g. True resistivity and Thickness). Figure 1 shows the ANFIS algorithm used for geoelectrical resistivity inversion.
The software module runs in MATLAB 2012 or newer version installation. If MATLAB software is not available then install MCR (Matlab run time environment) installer to run the software for the system without MATLAB.
Theory
The basic structure of the fuzzy inference system maps input characteristics to input membership functions, input membership functions to rules, rules to a set of output characteristics, output characteristics to output membership functions, and the output membership functions to a single-valued output or a decision associated with the output. An example structure of the ANFIS with rule evaluation is shown in Figure 2. The architecture shows the adaptive node (square) and fixed node (round).
Figure 2. An example structure of the ANFIS with rule evaluation 
Download figure
The selection of the FIS is the major concern when designing an ANFIS to model a specific target system. In the current study, the Sugeno type FIS model is chosen, since the consequent part of this FIS is a linear equation, and the parameters can be estimated by a hybrid error evaluation method. A typical fuzzy logic system with neural network structure consists of four major components: fuzzification interface, fuzzy rule base, fuzzy inference engine and defuzzification interface. The fuzzification interface (fuzzifier) converts numerical input data into suitable linguistic terms, which may be viewed as labels of the fuzzy sets. A fuzzy rule represents a fuzzy relation between two fuzzy sets. It takes the form such as “If X is A then Y is B”. Each fuzzy set is characterized by appropriate membership functions that map each element to a membership value between 0 and 1. A fuzzy rule base contains a set of fuzzy rules, where each rule may have multiple inputs and multiple outputs. Fuzzy inference can be realized by using a series of fuzzy operations. The defuzzification interface (defuzzifier) combines and converts linguistic conclusions (fuzzy membership functions) into crisp numerical outputs. The crisp output is generally obtained using different defuzzification strategies. It amalgamates two procedures, the logic decision and defuzzification procedures into one composite procedure 7. The neuro-fuzzy model originally presented by Sugeno and Yasukawa in 1993 16. The flow chart of the program is shown in Figure 1.
Rule 1: If x is A1 and y is B1, then f1=p1x + q1y +r1
Rule 2: If x is A2 and y is B2, then f2=p2x+q2y+r2
Initially, the data have been subjected to clustering analysis where subtractive clustering technique has been used before applying ANFIS algorithm. The resultant membership functions have been mapped to raise certain degree of membership grade between the input and output, and serves to raise the firing strengths for each membership function. Each function has a significant feature on rule framing and consequent parameters.
After importing AB/2 and apparent resistivity data, it is subjected to subtractive clustering algorithm (“genfis2” command used in MATLAB software). The cluster centers formed have been assigned a particular membership function (here “gaussmf”- Gaussian membership function” command is used in MATLAB software). Each membership function corresponds to each rule. After framing the rules, the ANFIS network has been initialized with hybrid learning algorithm with least square estimation and gradient descent method. The synthetic dataset has been obtained after the training, and this dataset has been subjected to slope variation method where the true resistivity and depth information are obtained. At this stage the primary training stops, and the output parameters i.e., synthetic datasets with corresponding true resistivity and depth are ready for training with ANFIS major class training as input and output parameters respectively. The output multilayer model has been compressed by linear regression so as to obtain a crisp compressed layer model.
ANFIS system consists of 5 layers; layer symbolized by the box is a layer that is adaptive and symbolized by the circle is fixed (Figure 2). Output of each layer is symbolized by O 1,i with i is a sequence of nodes and 1 is the sequence showing the lining. Here is an explanation for each layer 6, namely:
Layer 1
Serves to raise the degree of membership and the membership used here is Gaussian membership function.
O1,i= μA(x),i= 1,2 ….(1)
and
O1,i= μB(y),i= 1,2.. ….(2)
with x is the AB/2 values and y is the apparent resistivity values chosen as the input for the i-th node for primary class training, whereas for the major class training, AB/2 and apparent resistivity values of synthetic data have been chosen as input and the corresponding true resistivity and depth values have been chosen as output values for thei-th node

By { σand c} are the parameters of membership function or called as a parameter premise. σ signifies the cluster bandwidth, and c represents the cluster center.
Layer 2
Serves to evoke firing-strength by multiplying each input signal.
O2,i = wi = μA(x) x μB(y), i =1, 2. ….(3)
Layer 3
Normalizes the firing strength

Layer 4
Calculates the output based on the parameters of the rule consequent {pi , qi and ri}

Layer 5
Counts the ANFIS output signal by summing all incoming signals will produce
An adaptive network is a multilayer feedforward network in which each node performs a particular function (node function) on incoming signals as well as a set of parameters pertaining to this node. The formulas for the node functions may vary from node to node, and the choice of each node function depends on the overall input-output function which the adaptive network is required to carry out. Note that the links in an adaptive network only indicate the flow direction of signals between nodes; no weights are associated with the links 7.
The parameter set of an adaptive network is the union of the parameter sets of each adaptive node. In order to achieve a desired input-output mapping, these parameters are updated according to the given training data. A hybrid method consists of two phases 5:
1. Gradient descent which computes error signals recursively from the output layer backward to the input nodes, and
2. Least squares method, which finds a feasible set of consequent parameters 4, 9. This sequential method of LSE is more efficient for systems with changing characteristics. It can be calculated iteratively using the sequential formulas widely adopted in the literature 2, 6, 8, 15.
Software Validation
Data 1 collected from published work of Banerjee et al. in 2011 3 of Jaduguda (Jharkhand, India). The sounding data was inverted using the proposed automatic inversion and the results are shown below.
Figure 3 shows the main panel for inverting the geoelectrical sounding data. On inverting the data it produces multilayer model with subsurface regressed layer model (Figure 4 (a) and Figure 4 (b) respectively). Figure 4 (c) and (d) shows the number of rules and membership functions involved while training the data. Figure 4 (e) shows the appropriate litholog section of the corresponding data. Data 2 obtained form the Kanyakumari district (77 30' 50.29" E, 8 6' 31.79" N).
Figure 5 shows the main panel after inversion. On inverting the data it produces multilayer model with subsurface regressed layer model (Figure 6 (a) and Figure 6 (b) respectively). Figure 6 (c) and (d) shows the number of rules and membership functions involved while training the data. Figure 6 (e) shows the appropriate litholog section of the corresponding data. Figure 7 shows the actual litholog section for the collected data which correlates with the interpreted results.
Figure 3. Main panel for inverting the geoelectrical sounding data 
Download figure
Figure 4. RESinvANFIS inversion results for geolectrical data obtained from Data 1 
Download figure
Figure 5. Main panel for geoelectrical inversion of Data 2 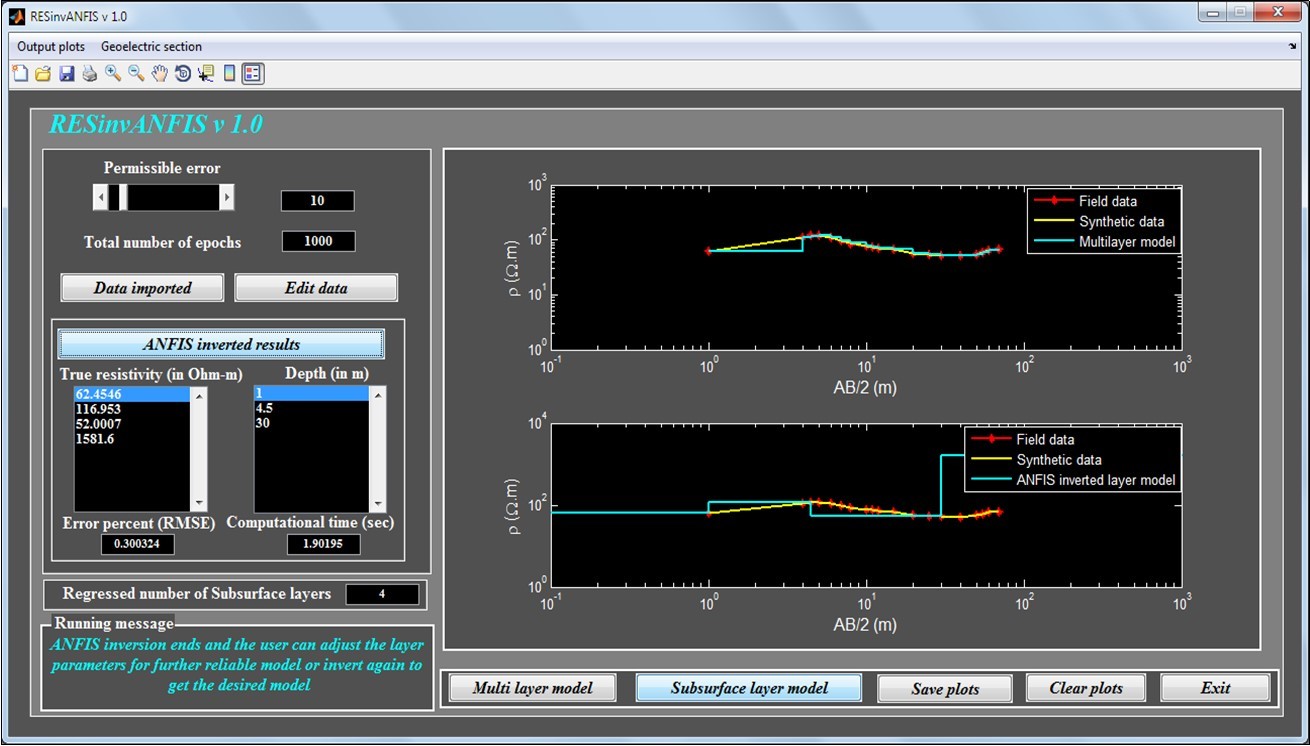
Download figure
Figure 6. RESinvANFIS geoelectrical data inversion results for data 2 
Download figure
Figure 7. Litholog section for validating 
Download figure
Impacts and Uses
RESinvANFIS provides excellent platform for geophysical researchers who got involved in interpreting data with soft computing approach. With this new algorithm, anyone can invert the geoelectrical sounding data. The modelling methodology will improve the pursuit of existing conventional interpretations algorithm that will rapidly allow the researchers to rely on soft computing methods in order to promote more number of research works which are helpful to the scientific societies. Below mentioned are some of the avenues of research that will benefit from RESinvANFIS. The software can be downloaded from the github repository (https://github.com/stanleyraj/RESinvANFIS-v-1.0)
In recent years, ANFIS modelling technique has been successfully employed to model complex systems, where classical methods e.g. mathematical and model-free methods are inapplicable due to lack of sufficient information 10.
ANFISis much more complex than the fuzzy inference systems discussed so far, and is not available for all of the fuzzy inference system options. Specifically, ANFIS only supports Sugeno-type systems, and these must have the following properties (MATLAB, 2008):
Have a single output, obtained using defuzzification methods (weighted average method used here). All output membership functions must be of the same type and either be linear or constant.
Have no rule sharing. Different rules cannot share the same output membership function, namely the number of output membership functions must be equal to the number of rules.
Have unity weight for each rule.
An error occurs if FIS structure does not comply with these constraints.
Moreover, ANFIS cannot accept all the customization options that basic fuzzy inference allows. That is, one cannot create their own membership or defuzzification functions in the ANFIS architecture, unless one can use the available membership and defuzzification functions.
Future Trends and Conclusions
The main areas of ANFIS technique have been covered in the previous sections. The major impact of applying these logics in geophysical, geological and reservoir engineering applications will produce a promising and more reliable output. Finally, quantification and reduction of uncertainty and the confidence interval are possible by more comprehensive use of fuzzy logic and neural networks. The true benefit of soft computing algorithm is to use the intelligent techniques in combination (hybrid) rather than isolation, has not been demonstrated to a full extent. This research addresses the particular areas for future research: hybrid systems and their application.
Hybrid Systems
Many hybrid systems can be built on the combining platform of neural networks, fuzzy logic and neuro fuzzy networks. For example, fuzzy logic can be used to combine results from several neural networks; Although some hybrid systems have been built, this present work has attained promising results when combining the fuzzy logic and neural networks. The field validation proves that this algorithm can have the bright future for estimating many non-linear problems.
References
- 1.Agin F, Khosravanian R, Karimifard M, Jahanshahi A. (2018) Application of adaptive neuro-fuzzy inference system and data mining approach to predict lost circulation using DOE technique (Case study: Maroon oilfield).
- 3.K S Banerjee, S P, A K Sarangi, Sengupta D.Delineation of subsurface structures using resistivity, VLF and radiometric measurements around a U- tailings pond and its hydrological implication. , Physics and Chemistry of Earth 36(16), 1345-1352.
- 7.Jang J S R. (1993) Adaptive-network based fuzzy inference system.IEEE. , Trans. Systems, Man and Cybernetics 23, 665-685.
- 9.Madsen K, Nielsen N B, Tingleff O. and Mathematical Modelling,Technical University of Denmark (2004) Methods for non-linear least squares problems.Technical Report Informatics.
- 10.Priyono A, Ridwan M, A J, Rahmat RAOK, Hassan A et al. (2005) Generation of fuzzy rules with subtractive clustering. , Jurnal Teknologi 43, 143-153.
- 11.Sabah M, Talebkeikhah M, Agin F, Talebkeikhah F, Hasheminasab E. (2019) Application of decision tree, artificial neural networks, and adaptive neuro-fuzzy inference system on predicting lost circulation: A case study from Marun oil field. , Journal of Petroleum Science and Engineering 177, 236-249.
- 12.Srinivas Y, Stanley Raj A, Hudson Oliver D, Muthuraj D, Chandrasekar N. (2012) A robust behaviour of Feed Forward Back propagation algorithm of Artificial Neural Networks in the application of vertical electrical sounding data inversion. , Geoscience Frontiers (Elsevier) 3(5), 729-736.
- 13.Srinivas Y, Stanley Raj A, Hudson Oliver D, Muthuraj D, Chandrasekar N. (2013) A novel and proficient algorithm for the inversion of geoelectrical resistivity data using Adaptive Neuro Fuzzy Inference System (ANFIS). International journal of recent scientific research 4(4). 485-489.
- 14.Raj Stanley, Srinivas A, Hudson Oliver Y, D.Muthuraj, D.2014. A novel and generalized approach in the inversion of geoelectrical resistivity data using. , Artificial Neural Networks (ANN) J. Earth Syst. Sci 123(2), 395-411.
- 15.Strobach P. (1990) Linear prediction theory: A mathematical basis for adaptive systems. , New york:Spring-verlag